

J’utilise principalement un Newton de 254mm de diamètre et de 1200mm de focale monté sur une monture Atlas EQ-G Go-to.

L’abri est entièrement utilisable à distance.
Le toit est motorisé avec un moteur d’essuie glace commandé par une carte Arduino UNO, elle-même commandée par l’ordinateur portable.
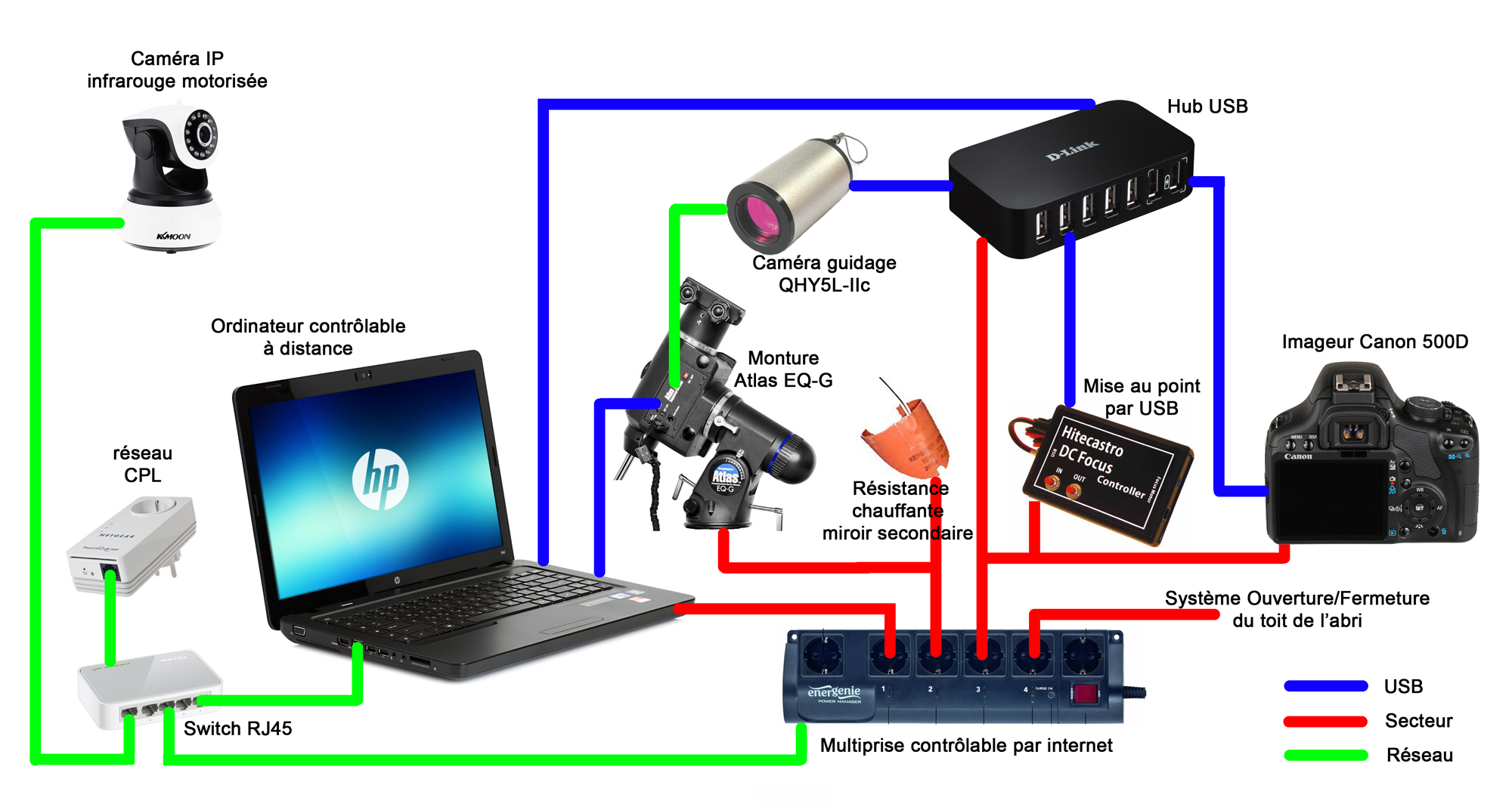
La monture, le reflex, la webcam pour l’autoguidage et le système de mise au point sont également reliés à l’ordinateur par USB. Une caméra IP infrarouge et motorisée permet de surveiller le bon déroulement des acquisitions dans le noir total. Une multiprise IP permet d’activer ou de désactiver l’alimentation des différents éléments de l’observatoire.
Finalement, l’ordinateur étant relié à internet par le réseau CPL, il est possible d’en prendre le contrôle à distance à l’aide du logiciel TeamViewer.
Schéma du montage :
Ouverture du toit :
Exemple du contrôle par la caméra ip :

L’imageur est un reflex Canon 500D monté derrière un diviseur optique pour l’autoguidage et un correcteur de coma GPU à 4 lentilles.
Le capteur fait 4752×3168 pixels, ce qui me donne un échantillonnage de 0,84″/pixel à 1200mm de focale.
Donnant un champ total de 1,1°x0,74° (la pleine Lune faisant 0,5° de diamètre)

L’ensemble est monté au foyer du télescope avec mise au point motorisée.

L’autoguidage est réalisé par PhdGuiding et EQmod avec une webcam planétaire QHY5L-IIc montée sur le diviseur optique.
